线段式(绿色的是根,橙色的是叶子结点,第
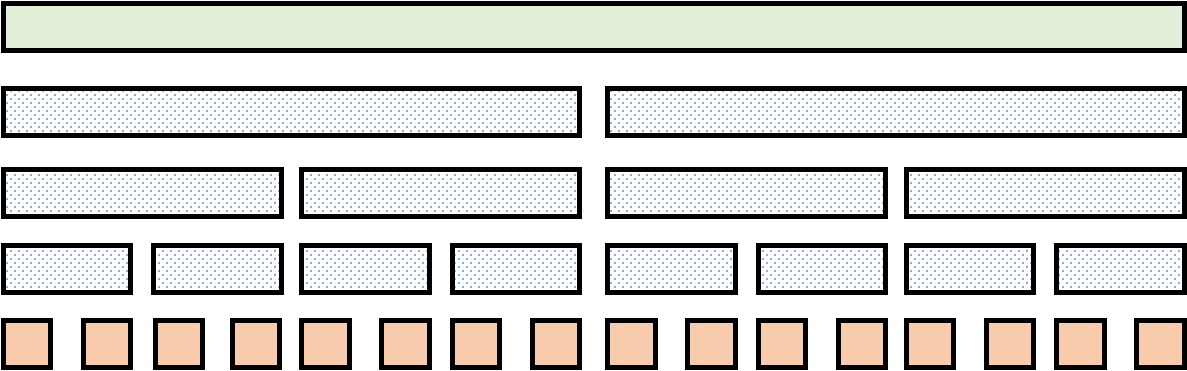
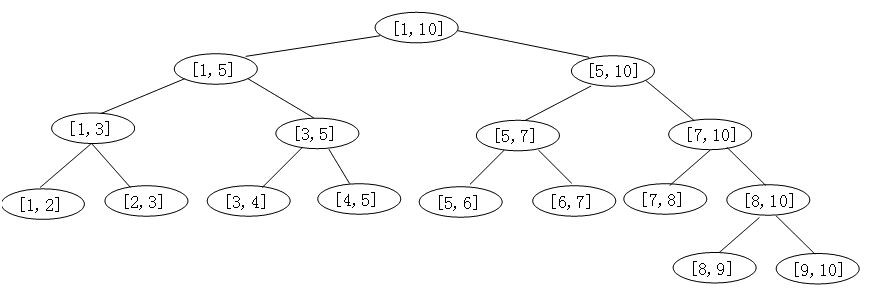
有根树式 1 :
学了这么久线段树,来回忆一下线段树吧!也许你没有学过?那看完本篇定能有所收获。
写在前面:因为是”基础线段树“,本篇的例题不会选的太难,都是比较板的题。
线段式(绿色的是根,橙色的是叶子结点,第
有根树式 1 :
通过线段树性质 1,我们通常采用二倍儿子表示法,即:若当前节点为
在下面的几个示例中,变量
线段树将一个区间分成
/// @brief 示例:区间查询对应线段树节点
/// @param L 需要查询的范围左端点
/// @param R 需要查询的范围右端点
void RangeQuery(int L,int R,int l,int r,int p) {
//这一条保证了最多分成 O(log n) 个节点
if(L<=l&&r<=R) {printf("Node number: %d\n",p); return ;}
int mid=(l+r)>>1;
if(L<=mid) RangeQuery(L,R,l,mid,p<<1);
if(mid<R) RangeQuery(L,R,mid+1,r,p<<1|1);
}
线段树的一个叶子节点显然直接对应的原序列中的元素,而它的深度是
通常我们会写一个 PushUp 函数,来接收更新元素信息,也就是接受两个儿子的并:
/// @brief 示例:维护区间和
void PushUp(int p) {
nodes_[p].data=nodes_[p<<1].data+nodes_[p<<1|1].data;
}
然后也是通过递归的方式来找到对应叶子节点:
/// @brief 示例:单点增加
/// @param X 元素在序列的位置(下标)
/// @param delta 元素增加的值
void NodeAdd(int X,int delta,int l,int r,int p) {
if(l==r) {nodes_[p].data+=delta; return ;}
int mid=(l+r)>>1;
if(X<=mid) NodeAdd(X,delta,l,mid,p<<1);
else NodeAdd(X,delta,mid+1,r,p<<1|1);
PushUp(p);
}
所有的线段树都支持单点修改(某种意义上可持久化线段树也算“修改”)。
我们发现直接区间修改并不能保证良好的复杂度。因此我们引入懒标记。懒标记维护这个节点整个子树都满足的性质。
通常我们会写一个 PushDown 函数来下传懒标记。(注意懒标记在区间修改、区间查询、单点修改都应该下传,否则得到的值不是真实的。)
/// @brief 示例:区间增加的 push down
/// @note l,r 并不一定要有,只是这个示例需要。
void PushDown(int p,int l,int r) {
int &tag=nodes_[p].add_lazy_tag;
int mid=(l+r)>>1;
nodes_[p<<1].add_lazy_tag+=tag;
nodes_[p<<1].data+=tag*(mid-l+1);
nodes_[p<<1|1].add_lazy_tag+=tag;
nodes_[p<<1|1].data+=tag*(r-mid);
tag=0;
}
然后通常也是通过递归修改:
/**
* @brief 示例:区间加操作
*
* @param L 需要修改的范围左端点
* @param R 需要修改的范围右端点
* @param delta 增量
*/
void RangeAdd(int L,int R,int delta,int l,int r,int p) {
if(L<=l&&r<=R) {
nodes_[p].data+=(r-l+1)*delta;
nodes_[p].add_lazy_tag+=delta;
return ;
}
PushDown(p,l,r); //注意 push down!
int mid=(l+r)>>1;
if(L<=mid) RangeAdd(L,R,delta,l,mid,p<<1);
if(mid<R) RangeAdd(L,R,delta,mid+1,r,p<<1|1);
PushUp(p);
}
对于某些信息,我们不一定需要初始建树;有些则一定要。自底向上建树,复杂度
/// @brief 示例:区间加法的建树
/// @param init_array_ 初始的序列
void TreeInitialConstruct(int *init_array_,int l,int r,int p) {
if(l==r) {nodes_[p].data=init_array_[l]; return ;}
int mid=(l+r)>>1;
TreeInitialConstruct(init_array_,l,mid,p<<1);
TreeInitialConstruct(init_array_,mid+1,r,p<<1|1);
PushUp(p);
}
区间加,查询区间和。
你完全可以参考上面的示例来实现它。
这道题写了 Doxygen 注释,读起来应该很方便。
如果对 C++ 语法熟悉的话,建议参考该代码的方式实现线段树,好写好调好用,效率也还行,尽管基本上拿不到最快解。
如果不熟悉 C++ 语法,建议读懂实现思路就行,避免因为内存分配问题写炸调很久。
区间赋值,区间加,查询区间最大值。
最基础的区间操作问题之一。可以考虑对赋值和加法都维护一个懒标记。当赋值存在的时候,加法就加在赋值标记上;当赋值的时候,清空加法标记。这样保证赋值的优先性,而不遗漏加法。
可以发现赋值操作的懒标记可以简化成一个 bool 类型,当为 true 的时候表示整个区间相等,此时区间最大值(节点维护的答案)也就是这个区间里面的数;当为 false 的时候,整个区间不保证完全相等。
区间加,区间乘,查询区间和。
较基础的区间操作问题。发现最难的是区间修改,如何保证复杂度?当然是懒标记。
我们发现一个懒标记无法储存足够的信息,那么我们维护两个懒标记,分别维护常数项和未知数的系数。
也就是,因为我们不知道当前节点的子树内某一个节点的值是什么,不同子节点的值也不同,不妨设其为未知量
当 push down 懒标记的时候,下面的节点就会变为:
注意每次加法的时候,应该加
这个过程很自然,就并不需要考虑什么顺序问题了。
权值线段树是一种以值域为维护序列,每个点维护对应区间内有多少个原序列中的数。它和普通线段树的关系就好像桶和数组的关系一样。
通过权值线段树,我们可以快速统计给定值域区间
通常权值线段树维护的值域很大,可以选择离散化。无法离散化的时候,可以选择动态开点。
动态开点线段树是指没用的点不开的线段树:我们发现就算值域
动态开点线段树的写法与之前的线段树有些不同,因为动态开点线段树不满足我们所说的线段树性质 1,便不能使用二倍儿子表示法。因此需要记它的左右儿子编号(如果存在的话)。通常我们这样写:
struct node {
int left_son,right_son;
int cnt;
...
node() {left_son=right_son=cnt=0;}
};
node nodes_[kSIZE]; //其实我的习惯是写指针然后 new 一个数组。
int nodes_pointer_; //这个在记得初始化为 0。
int NewNode() {return ++nodes_pointer_;}
之后要申请新节点就可以直接 NewNode 了,然后指定左右节点。递归的时候,直接写 nodes_[p].left_son 或 nodes_[p].right_son 即可,而不是 p<<1 或者 p<<1|1 了。
需要注意的是,动态开点线段树的操作细节和普通线段树略有不同:查询递归时遇到空节点就要返回;修改递归时遇到空节点要新建(记得把父节点的指针指向它);push down 的时候,遇到空节点也应该新建节点,但不应该深入到更深层次。总之就是关于空节点的细节。
结合权值线段树,通过线段树上二分,我们可以做到一些全局查询操作。它可以查询全局第
具体来说,设当前节点左儿子的对应区间的元素个数是
/// @brief 查找当前区间第 k 大。
/// @note 如果是动态开点线段树,保持原样即可。如果是离散化后的普通权值线段树,那么
/// left_son 就是 p<<1,right_son 就是 p<<1|1。
int BinarySearch_kth_Element(int k,int l,int r,int p) {
if(l==r) return l;
int mid=(l+r)>>1,cnt_now=nodes_[nodes_[p].left_son].cnt;
if(k<=cnt_now)
return BinarySearch_kth_Element(k,l,mid,nodes_[p].left_son);
return BinarySearch_kth_Element(k-cnt_now,mid+1,r,nodes_[p].right_son);
}
类似于桶,普通权值线段树并不能求区间第
可以插入一个数、删除一个数;查询一个数的排名,查询排名为
的数;查询一个数的前驱,查询一个数的后缀。
没错!没用的旋转 treap 可以被权值线段树所代替!把操作离线下来离散化。删除和加入就是单点加 1 和单点减 1,查询第
查询前驱后继的做法,还是直接找。拿前驱举例:找到查询值对应链。如果不存在,找到出现不存在的那个点,然后一直尽量靠右儿子走即可;如果存在,找到最后一个分叉(也就是
不过可以使用一个技巧:前驱就查询比
这个做法常数、代码量之类的都很好,不过复杂度可能会被卡:
前置知识:向量与矩阵乘法初步
线段树维护的元素当然不限于数字!比如线性代数中最最常用的向量和矩阵。通过这两个东西,我们可以大幅减少问题的难度,简化运算,使运算更加程序化,有规律可寻。
通常线段树维护的元素是数值或者某个数值。但实际上线段树里面可以套数据结构,只要这个数据结构可以合并(上文提到的性质 4)。因此向量是线段树可以维护的一个东西。
它用来解决什么问题呢?大概是元素内部的元素还有互相影响的时候了!结合下面例题来看看吧:
给定一个序列,第
个元素是一个三元组 。有六种区间操作,分别是:( 是一个指定的整数)
, , , , , . 另外,还会查询区间
的 之和, 之和以及 之和。
我们发现普通的线段树很难维护这种元素内部互相影响,但元素间独立的问题。但是我们可以联想到,我们学过哪种变换能让元素内部互相影响呢?矩阵乘法!当向量乘以一个矩阵的时候,向量内的每一个坐标都是互相有影响的。
再看看这个形式,如果把三元组看做一个向量,那这些操作不都是它乘以一个矩阵嘛!
也许你会问常数怎么办?这有一个套路:再设立一个常数项,初始第
那么变换的矩阵长什么样呢?其实自己推一推就可以了。这里拿操作 1,4,6 举例:
(注意这个矩阵是按照列变换推的,要注意一下遍历顺序。)
通过以上推导我们简单地解决了这道题,而不用繁杂地分类讨论了。同时我们也能发现,操作必须是线性变换才行!即运算得是线性的(数乘和加法),而不能是形如
Code 2(矩阵展开优化,但没优化多少)。
既然线段树可以维护向量操作,线段树当然也可以维护矩阵乘法!不只是普通矩乘,广义的都可以。
比如我们把普通矩阵乘法的“乘”定义成加法,“加”定义成
DP 转移的本质是线性变换,也就是矩阵乘法。对于某些 DP,把 DP 初始状态写成一个向量,转移的过程写作一个矩阵,那么最终状态就是这个向量依次乘以各个矩阵。
举个例子:
一个细节是
假如我们增加多次询问,每次询问修改
显然可以直接暴力算,这样是平方级别的复杂度,不好。
但是由于矩阵的结合律,我们开一颗线段树,维护转移矩阵构成的序列。由于矩阵乘法有结合律,这样做是没有问题的。修改
这样,问题的复杂度就降为了
请注意,由于矩阵乘法没有交换律,线段树维护的矩阵必须保证顺序。
这就是 DDP 结合线段树。
请注意,DDP 远不止这些,这仅仅是用线段树维护的部分。DDP 是指动态初始状态,动态转移参数、次数的 DP。举个例子,线段树维护的是区间问题,我们还可以采用倍增预处理解决树上问题,比如 P8820 [CSP-S 2022] 数据传输。
同时你应当注意到,动态 DP 结合线段树 和 区间矩阵乘法解决元素间相互影响的问题 的一个明显的区别是前者线段树维护的元素就是矩阵,求的就是区间矩阵的积;后者线段树维护的元素是向量,求的是区间向量的和(包括但不限于和),矩阵乘法只是区间操作。
给定一条链,边有边权
,点按 1~n 顺序给出;初始每个点 上有一个编号为 的芯片,可以移到任意一个位置,代价为经过的边权和。求让芯片编号为错排(即 )的最小代价。过程中允许芯片重合,但在结束时不允许。 给定
次询问,每次给定 ,修改 的值为 。每次修改后输出最小代价。
显然一条边一定会被经过偶数次。并且,第一条边和最后一条边必须被经过;不允许有连续两个边不被经过,否则中间的点无法形成错排。满足这些条件的选边方案被称为合法的。
设所有的边权和为
因此我们考虑选若干段连续的边经过两次,并且每段之间空一个边不经过,就可以得到更少的代价。并且可以看出,这种方法涵盖了所有合法的经过的边的选择情况。任何一种合法选边方案,都可以优化成这类方案。举个例子:
这下我们就可以写出 DP 式子了:
练习:仿照上文的举例写出 DP 转移的矩阵乘法形式。
得到 DP 式之后,发现 DP 转移的矩阵构成一个序列,因此可以用线段树维护矩阵乘法。修改
可以发现,DDP 的难点并不在用线段树维护,而还是在得出 DP 转移形式。线段树仅仅是一种维护方式罢了。